
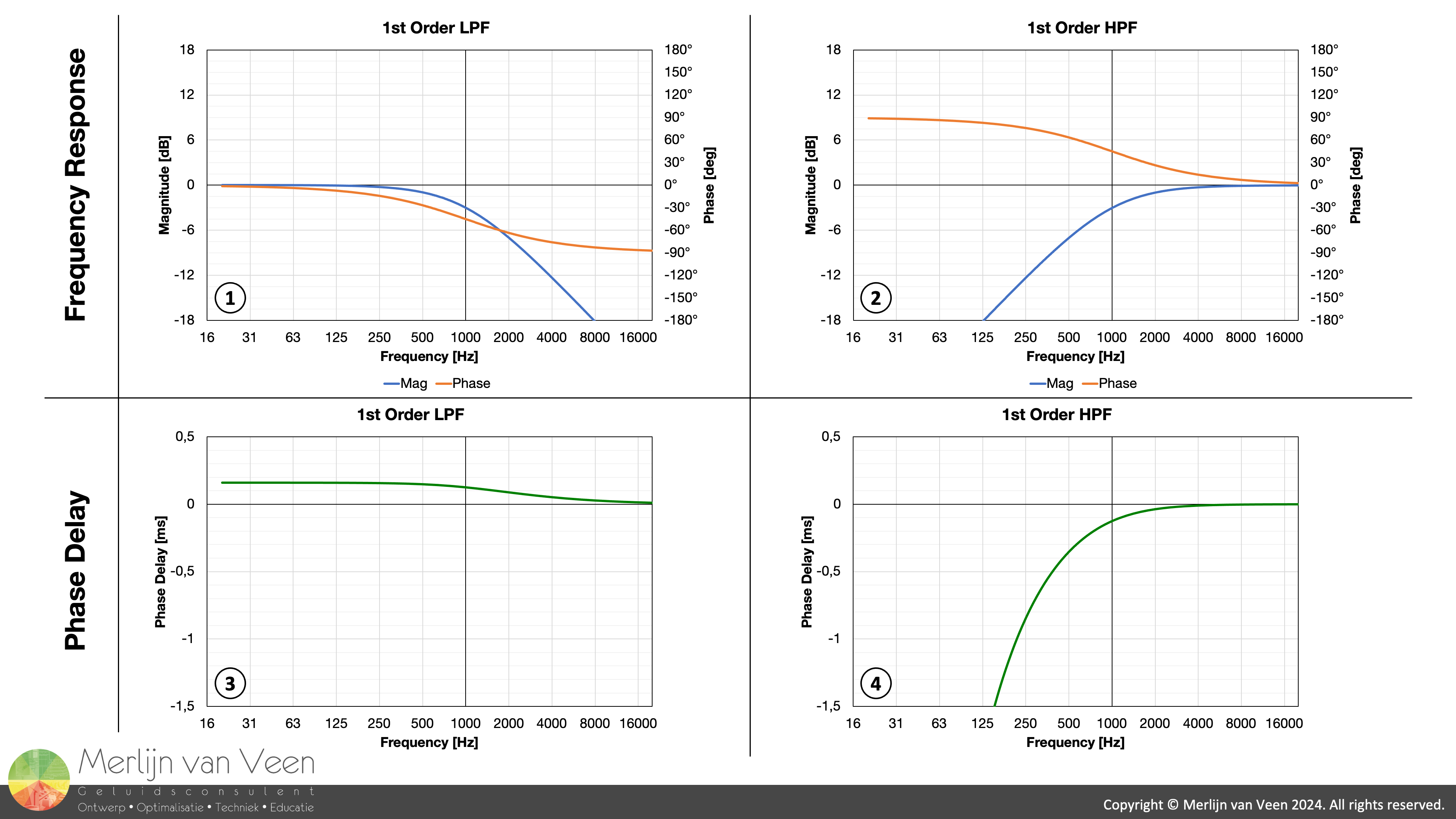
 Figure 1Low‑pass filters introduce — negative — phase shift (Figure 1.1) which does not violate causality (cause and effect). That is, the filter's output does not occur before its input.
Figure 1Low‑pass filters introduce — negative — phase shift (Figure 1.1) which does not violate causality (cause and effect). That is, the filter's output does not occur before its input.
Conversely, high‑pass filters introduce — positive — phase shift (Figure 1.2) which paradoxically suggests the filter's output occurs before its input. In other words: time travel...
I was reminded of an AES paper from 2010 by Dash and Fricke (that I had read before) which eluded me at the time. Where the authors give a possible explanation for the high‑pass filter's — apparent — violation of causality.
Fast‑forward a couple of years, where upon re‑reading the paper, it suddenly made a whole lot more sense to me. The paper is quite dense, and I am much more of a visual person, so please permit me to attempt at describing the authors' considered causal model for phase delay in pictures.
Toy Problem
Figure 1 shows the same "toy‑problem" (with first‑order filters) as the authors initially use in their paper. From the filter's phase delay, that is, the delay of the sinusoidal components' — phases — one can tell that the low‑pass filter (Figure 1.3) lags by various amounts. Whereas the high‑pass filter (Figure 1.4) paradoxically leads by various amounts.
Dash and Fricke attempt to resolve this paradox (and more) by mathematically decomposing the response — to a gated sine wave — of each filter, in three distinct parts: a) an in‑phase sinusoidal component, b) a secondary sinusoidal component — that lags by 90° — and c) an exponential component.
The sinusoidal components are "steady state" (everlasting, from "big bang" to "big crunch") and in tandem, team up to create the usual oscillograms (see video towards the end) one tends to leverage when discussing the topic.
The "transient‑state" exponential, only plays a part at the waveform's onset. Its influence diminishes over time, leading to the steady‑state solution governed by the sinusoidal components.
Low-Pass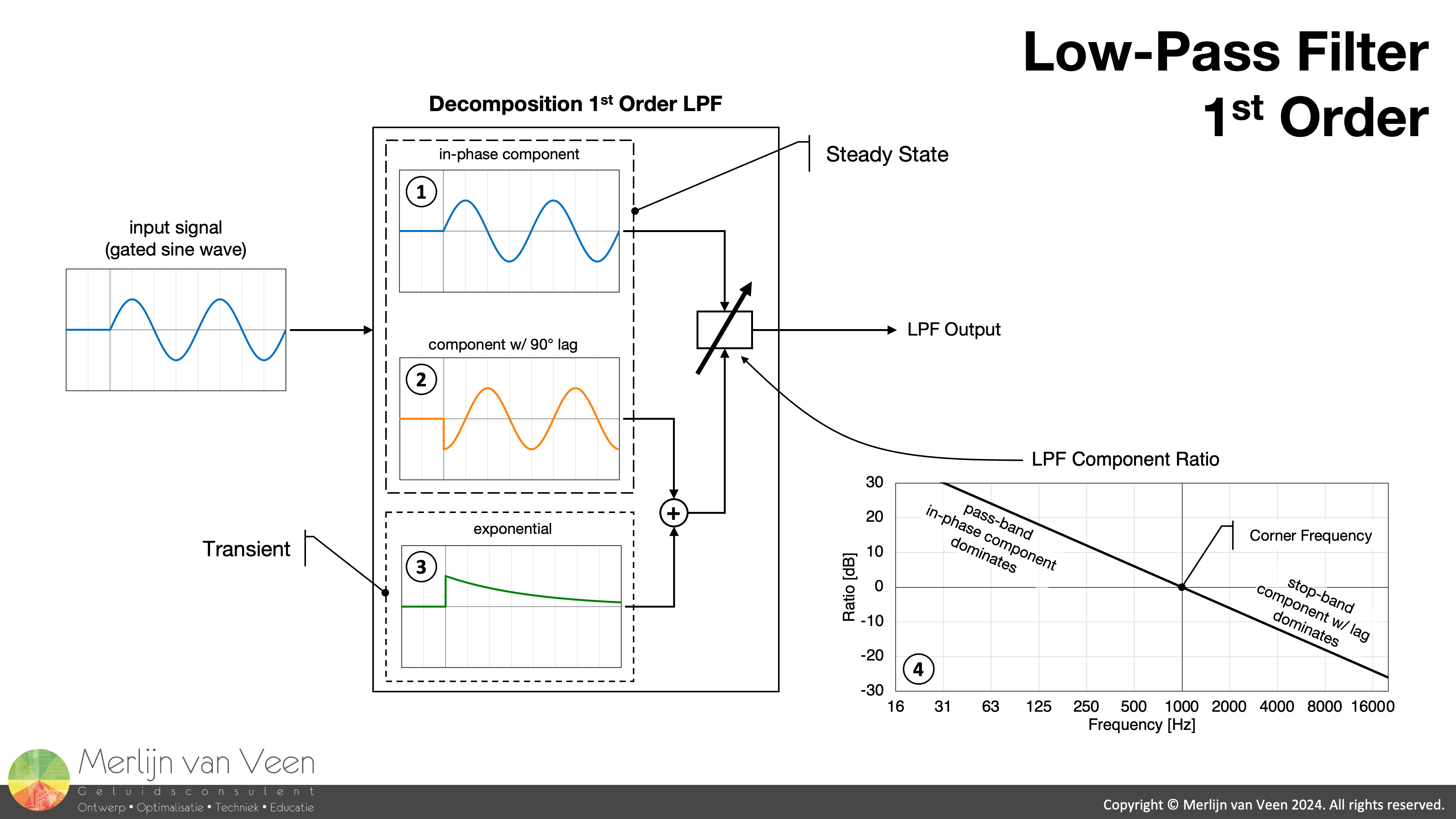 Figure 2Figure 2 shows the decomposition of the low‑pass filter‑response. Note the unambiguous 90‑degree lag (shift to the right) of the secondary sinusoidal component in Figure 2.2.
Figure 2Figure 2 shows the decomposition of the low‑pass filter‑response. Note the unambiguous 90‑degree lag (shift to the right) of the secondary sinusoidal component in Figure 2.2.
This shifted version is added to the exponential, and their combined sum is then — blended in — with the in‑phase component (Figure 2.1). Where the mix‑ratio is a function of frequency (Figure 2.4).
In the pass band, the in‑phase component dominates whose phase shift is zero degrees. Whereas in the stop band, the 90‑degree‑lag component dominates. And at the corner frequency, one gets one part each which results in -45 degrees (Figure 1.1).
High‑Pass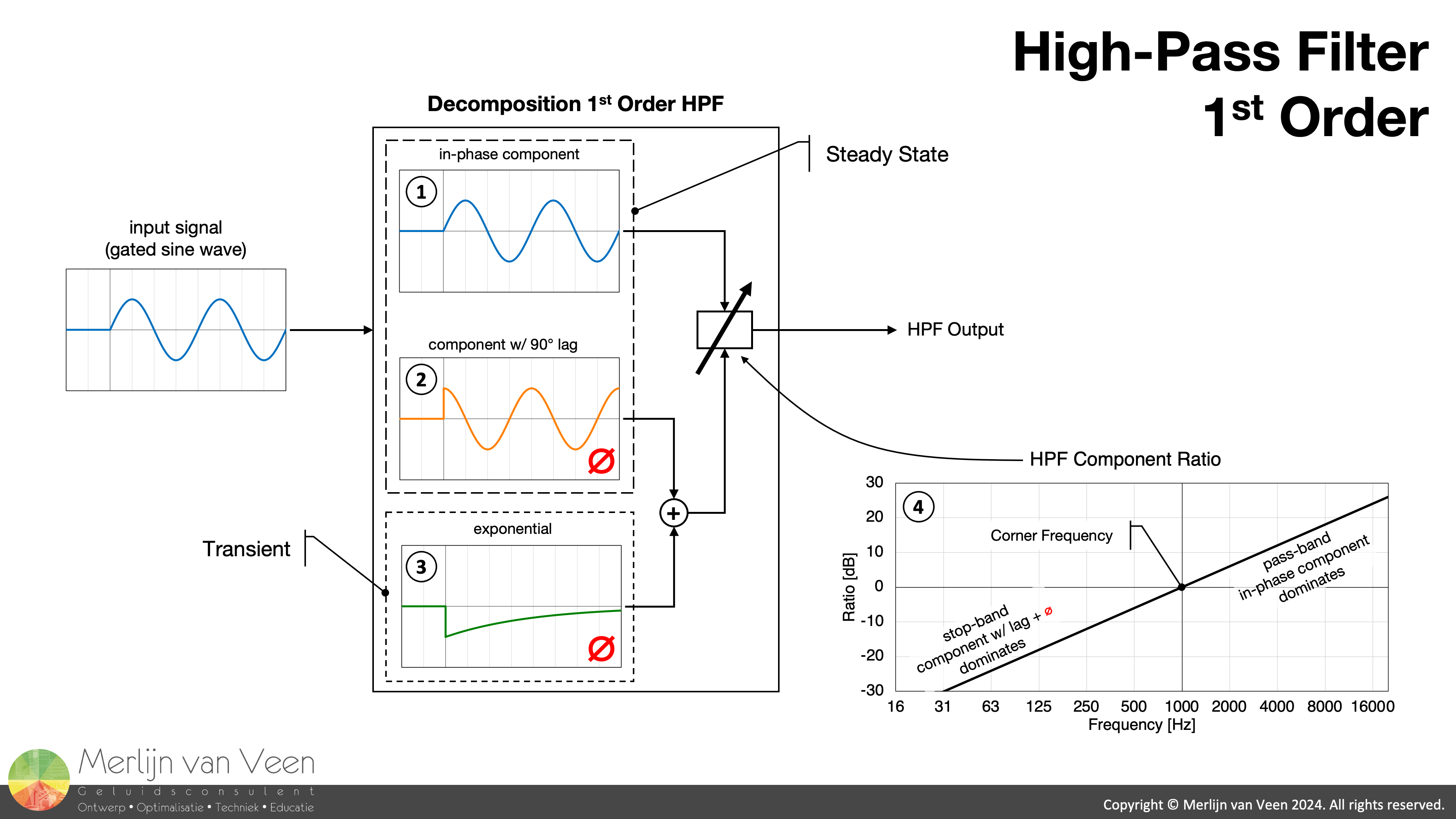 Figure 3Figure 3 shows the decomposition of the high‑pass filter‑response. It is effectively the same as the low‑pass filter — except for one major caveat — both 90‑degree‑lag component and exponential (and subsequently their sum) are polarity reversed!
Figure 3Figure 3 shows the decomposition of the high‑pass filter‑response. It is effectively the same as the low‑pass filter — except for one major caveat — both 90‑degree‑lag component and exponential (and subsequently their sum) are polarity reversed!
Notice when you "flip" the 90‑degree‑lag component (Figure 3.2), it — appears — to lead (by the same amount) as opposed to lag. But a polarity reversal does not affect time contrary to sign.
In the pass band, the in‑phase component once more dominates whose phase shift is zero degrees. Whereas in the stop band, the 90‑degree‑lag component — with polarity reversal — dominates. And at the corner frequency, one gets one part each which results in +45 degrees (Figure 1.2) as opposed to -45°.
Think: Cross-Fade Not Phase‑Shift
The video below shows what happens for each filter, when one sweeps through frequencies and effectively "cross fades" from: a) the in‑phase component, into b) the 90‑degree‑lag component, without and with polarity reversal. Where output‑mix amplitudes have been normalized.
Notice that for the low‑pass filter (left example), the mixed result wanders to the right, and starts to lag. Whereas for the high‑pass filter (right example), the mixed result wanders to the left, and paradoxically — appears — to lead.
However, looks can be deceiving. One merely sees the — net result — of both the 90‑degree‑lag component and polarity reversal in tandem. However, the latter does not stop the former from being late.
Subsequently, Dash and Fricke argue that no causality is violated. The polarity reversal, covertly baked into the high‑pass filter, merely makes it — appear — like so. Which is an interesting idea worthy of additional consideration.
Conclusion
The paper's authors claim their model can be generalized. And also applies to all‑pass filters as well as higher‑order filters. What do you think?